
CAN-Bus diagnosis function of USBCAN-II Pro
We all know the powerful function of GCAN USB-CAN device(USBCAN-II Pro) . Including CAN-Bus diagnosis function. And we are very sure that people used it had this idea.
Today let's learn about its function of CAN-Bus diagnosis.
CAN-Bus diagnosis function can detect the bus error frames and bus arbitration lost.

Today let's learn about its function of CAN-Bus diagnosis.
CAN-Bus diagnosis function can detect the bus error frames and bus arbitration lost.
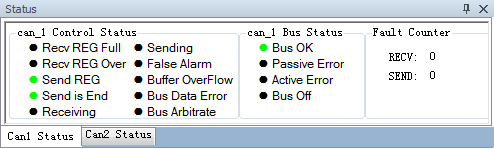
CAN-Bus diagnosis:
CAN-Bus status display: indicate the CAN-Bus status including Bus normal, passive error, active error, Bus off.
CAN controller FIFO overflow: the messages are too dense to data loss within a period time.
CAN controller error alarm: when many of errors happened on the bus, error counter exceeds the alarm threshold, and display the error count.
CAN controller negative error: when many of transmitting or receiving errors happened, lead to the CAN controller into the negative state, and display the error count.
CAN controller arbitration lost: when this node failed to compete to the CAN-Bus with other equipment, the message would try to transmit next time, and catch the corresponding error information to display.
CAN controller error: when CAN-Bus transmit or receive errors, the value of error counter will be accumulated, and can catch the wrong information, such as ACK, CRC error and so on.
CAN data buffer overflow: without exchanged data to computer during a time, lead storage message number exceed hardware capacity limitation, and new received message cover the earliest message.
If you are our new user, or are ready to use this device, now you must learn CAN-Bus diagnosis function about GCAN USBCAN-II Pro.
At last, if you want to learn more, just leave us a message, we are very happy to do something to help you. And you will find what a Powerful CAN-Bus diagnosis function.
Our Email/Skype: seven.gcan@gmail.com
Tel: +86 15712411229.
CAN-Bus status display: indicate the CAN-Bus status including Bus normal, passive error, active error, Bus off.
CAN controller FIFO overflow: the messages are too dense to data loss within a period time.
CAN controller error alarm: when many of errors happened on the bus, error counter exceeds the alarm threshold, and display the error count.
CAN controller negative error: when many of transmitting or receiving errors happened, lead to the CAN controller into the negative state, and display the error count.
CAN controller arbitration lost: when this node failed to compete to the CAN-Bus with other equipment, the message would try to transmit next time, and catch the corresponding error information to display.
CAN controller error: when CAN-Bus transmit or receive errors, the value of error counter will be accumulated, and can catch the wrong information, such as ACK, CRC error and so on.
CAN data buffer overflow: without exchanged data to computer during a time, lead storage message number exceed hardware capacity limitation, and new received message cover the earliest message.
If you are our new user, or are ready to use this device, now you must learn CAN-Bus diagnosis function about GCAN USBCAN-II Pro.
At last, if you want to learn more, just leave us a message, we are very happy to do something to help you. And you will find what a Powerful CAN-Bus diagnosis function.
Our Email/Skype: seven.gcan@gmail.com
Tel: +86 15712411229.




