
High-speed CAN and low-speed, fault-tolerant CAN
Do you know the difference between high-speed CAN and low-speed, fault-tolerant CAN?
Recently, Engineer Li from a company in Guangzhou contacted us and said that he found our USBCAN analyzer could not communicate with his CAN bus. After the after-sales technical support engineer and Li Gong confirmed it, the reason was found. His device uses low-speed, fault-tolerant CAN communication, which couldn't communicate with our standard high-speed CAN bus analyzer.

Figure 1 High-speed CAN, low-speed/fault tolerant CAN
So why high-speed CAN couldn't communicate with low-speed CAN? In fact, fault-tolerant CAN and high-speed CAN are consistent at the data link layer, but there are big differences in the physical layer transceivers, which causes them different in the electrical levels of dominant and recessive bits, as Figure 2 and Figure 3.
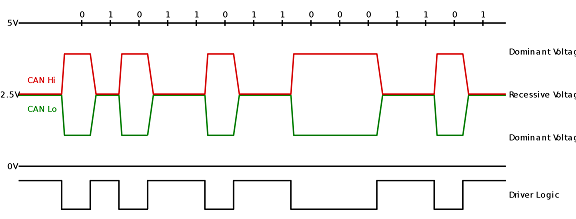
Figure 2 High-speed CAN signal
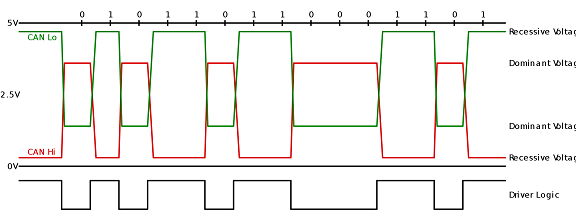
Figure 3 Low-speed CAN signal
How do you tell the device to use high-speed CAN or low-speed, fault-tolerant CAN?
1. Fault-tolerant CAN and high-speed CAN are different in the range of supported baud rates. High-speed CAN supports a baud rate of 5k-1M, but fault-tolerant CAN only supports a baud rate of 5K-125K.
If your device cannot communicate with high-speed CAN devices and the baud rate is between 5K and 125K, it is very likely that your device is using low-speed, fault-tolerant CAN communication.
2. The voltages of CAN_H and CAN_L with respect to ground are also different in high-speed CAN and low-speed, fault-tolerant CAN.
When the bus is in idle state, the voltages of CAN-H and CAN-L with respect to ground in high-speed CAN are both about 2.5V, while the voltage of CAN-L with respect to ground in low-speed, fault-tolerant CAN is about 5V, and the voltage of the CAN-H with respect to ground is about 0V.
When the bus is in valid state, the voltage of CAN-H with respect to ground is about 3.6V, the voltage of CAN-L with respect to ground is about 1.4V in high-speed CAN, and the voltage of CAN-H with respect to ground in is about 4V, and the voltage of CAN-L to ground is about 1V in low-speed, fault-tolerant CAN.
Recently, Engineer Li from a company in Guangzhou contacted us and said that he found our USBCAN analyzer could not communicate with his CAN bus. After the after-sales technical support engineer and Li Gong confirmed it, the reason was found. His device uses low-speed, fault-tolerant CAN communication, which couldn't communicate with our standard high-speed CAN bus analyzer.
Figure 1 High-speed CAN, low-speed/fault tolerant CAN
So why high-speed CAN couldn't communicate with low-speed CAN? In fact, fault-tolerant CAN and high-speed CAN are consistent at the data link layer, but there are big differences in the physical layer transceivers, which causes them different in the electrical levels of dominant and recessive bits, as Figure 2 and Figure 3.
Figure 2 High-speed CAN signal
Figure 3 Low-speed CAN signal
How do you tell the device to use high-speed CAN or low-speed, fault-tolerant CAN?
1. Fault-tolerant CAN and high-speed CAN are different in the range of supported baud rates. High-speed CAN supports a baud rate of 5k-1M, but fault-tolerant CAN only supports a baud rate of 5K-125K.
If your device cannot communicate with high-speed CAN devices and the baud rate is between 5K and 125K, it is very likely that your device is using low-speed, fault-tolerant CAN communication.
2. The voltages of CAN_H and CAN_L with respect to ground are also different in high-speed CAN and low-speed, fault-tolerant CAN.
When the bus is in idle state, the voltages of CAN-H and CAN-L with respect to ground in high-speed CAN are both about 2.5V, while the voltage of CAN-L with respect to ground in low-speed, fault-tolerant CAN is about 5V, and the voltage of the CAN-H with respect to ground is about 0V.
When the bus is in valid state, the voltage of CAN-H with respect to ground is about 3.6V, the voltage of CAN-L with respect to ground is about 1.4V in high-speed CAN, and the voltage of CAN-H with respect to ground in is about 4V, and the voltage of CAN-L to ground is about 1V in low-speed, fault-tolerant CAN.

Don't be worry if you find your device is using low-speed, fault-tolerant, a GCAN-403 converter can helps.
Welcome to contact us, if you want to know more about GCAN and GCAN products.
Tel: +86 13609896275.
Email: sygckj@gmail.com
Welcome to contact us, if you want to know more about GCAN and GCAN products.
Tel: +86 13609896275.
Email: sygckj@gmail.com




